
单机多工位机械手有哪些工作原理?
发布时间:2024-12-31 10:44:35 浏览:5次 责任编辑:东莞佑亿设备
单机多工位机械手的工作原理主要涉及自动化控制和机械运动两个方面,以下是对其工作原理的详细阐述:
一、基本组成与结构
单机多工位机械手主要由执行机构、驱动系统和控制系统三部分组成。执行机构是机械手的运动部分,包括手臂、手腕和夹具(如吸盘抓手)等,用于实现工件的抓取、移动和放置等操作。驱动系统为执行机构提供动力,通常采用气压、液压或电动(如伺服电机)等方式。控制系统则负责对机械手的运动轨迹、速度和力量进行精确控制,确保机械手能够按照预设的程序完成作业。
二、工作原理
运动控制:
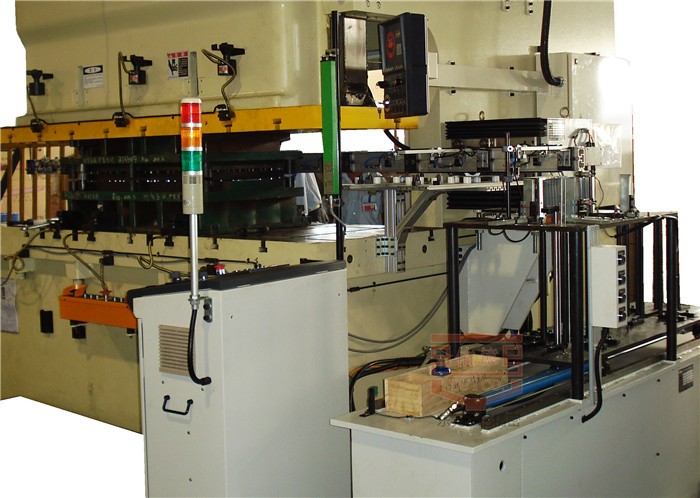
机械手通过高性能伺服电机带动精密研磨滚珠丝杆驱动,由高速直线导轨导向,实现沿直线滑轨方向的精确运动。这种运动方式具有静音、滚珠之间无摩擦磨损、重负荷以及润滑脂高保持性等特点,确保高速、静音、长寿命的运动表现。
机械手的移送单元(如移送横杆)根据移送方向布置在冲床的左边或右边,通过横梁杆连接左右的夹紧单元,而吸盘抓手则安装在连接杆上,用于吸取模具内的工件。
工件抓取与放置:
在冲压过程中,机械手通过吸盘抓手或夹具自动抓取工件,并根据预设的程序将其传送到指定的冲压工位。在传送过程中,机械手会保持工件的稳定,以确保冲压质量。
冲压完成后,机械手再将工件传送到下一个工位或下道工序,实现生产线的自动化。
同步与协调:
单机多工位机械手通常与冲床的曲轴相连接,通过编码器实时监控冲床曲轴的角度,确保机械手与冲床的同步运行。在冲床一个作业周期内,根据编码器反馈的数据控制伺服电机,使机械手的二条轴按照事先编好的运动轨迹进行准确精密的搬送定位。
这种同步与协调机制确保了机械手在冲压生产中的高速、高精度和全自动化。
检测与保护:
机械手配备了工件检测感应装置,可以防漏夹产品而损坏模具。同时,在发生异常或故障时,机械手的控制系统会发出报警信号,并停止自动运行,以保护设备和工件的安全。
三、技术优势与应用领域
单机多工位机械手具有高精度、高效率、高灵活性和高可靠性等技术优势。它广泛应用于汽车制造、家电制造、金属加工等行业,特别是在需要高速、高精度和全自动化的冲压生产线上。通过模拟人类手臂的动作,实现对工件的精确抓取和放置,从而提高了生产效率和产品质量。
综上所述,单机多工位机械手的工作原理涉及自动化控制和机械运动等多个方面,其高效、精确和可靠的性能为现代工业生产提供了有力的支持。
