
深度解析:多工位机械手如何高效、安全地完成冲压作业
发布时间:2024-10-16 14:18:15 浏览:98次 责任编辑:东莞佑亿设备
多工位机械手的工作原理主要基于其组成部分和操作流程。以下是对其工作原理的详细解析:
一、组成部分
执行机构:这是机械手的运动部分,主要包括手臂、手腕和夹具等。这些部件负责模拟人类手臂的动作,实现对工件的精确抓取和放置。
驱动系统:为执行机构提供动力,通常采用气压、液压或电动等方式。这些动力源能够确保机械手在执行任务时具有足够的力量和速度。
控制系统:负责对机械手的运动轨迹、速度和力量进行精确控制。控制系统通常包括硬件和软件两部分,硬件部分如传感器、执行器等设备,软件部分则用于编程和控制机械手臂的运动和操作。
二、操作流程
抓取工件:在冲压生产线上,多工位机械手会根据工件的形状和尺寸,通过夹具自动抓取工件。
传送工件:机械手将抓取到的工件传送到指定的冲压工位。这一过程中,机械手需要保持工件的稳定,以确保后续冲压作业的质量。
冲压作业:在冲压工位上,机械手会配合冲压设备对工件进行冲压成型。此时,机械手需要保持工件的精确定位,以确保冲压作业的准确性。
下料与传送:冲压完成后,机械手将工件从冲压工位上取下,并传送到下一个工位或下道工序。这一过程中,机械手同样需要保持工件的稳定,以避免工件在传送过程中受到损坏。
三、技术特点
高效性:多工位机械手可以在短时间内完成大量工件的取料、传送和定位等操作,大大提高了生产效率。
稳定性:机械手采用先进的传动方式和精密的机械结构,确保了冲压作业的稳定性。即使在长时间连续作业下,也能保持较高的精度和稳定性。
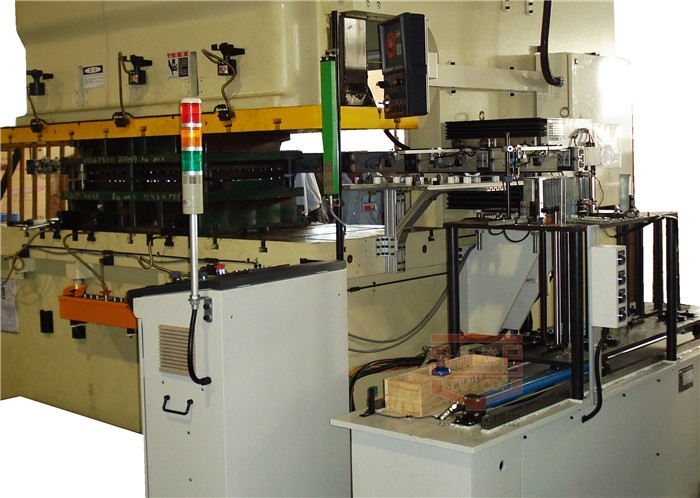
安全性:多工位机械手通常配备有安全保护装置,如光栅保护、急停按钮等,以确保操作人员的安全。同时,机械手的精准控制也能有效避免产品缺陷和废品产生。
可编程性:多数多工位机械手都配备了可编程控制器,可以根据不同的生产需求进行编程调整。这种灵活性使得机械手能够适应多种不同的冲压作业,降低了生产成本。
综上所述,多工位机械手的工作原理是通过其组成部分的协同工作,实现对工件的精确抓取、传送、定位和冲压等操作。同时,机械手的高效性、稳定性、安全性和可编程性等特点也使其在现代工业生产中发挥着越来越重要的作用。
